Swerve-Drive Balancing Robot
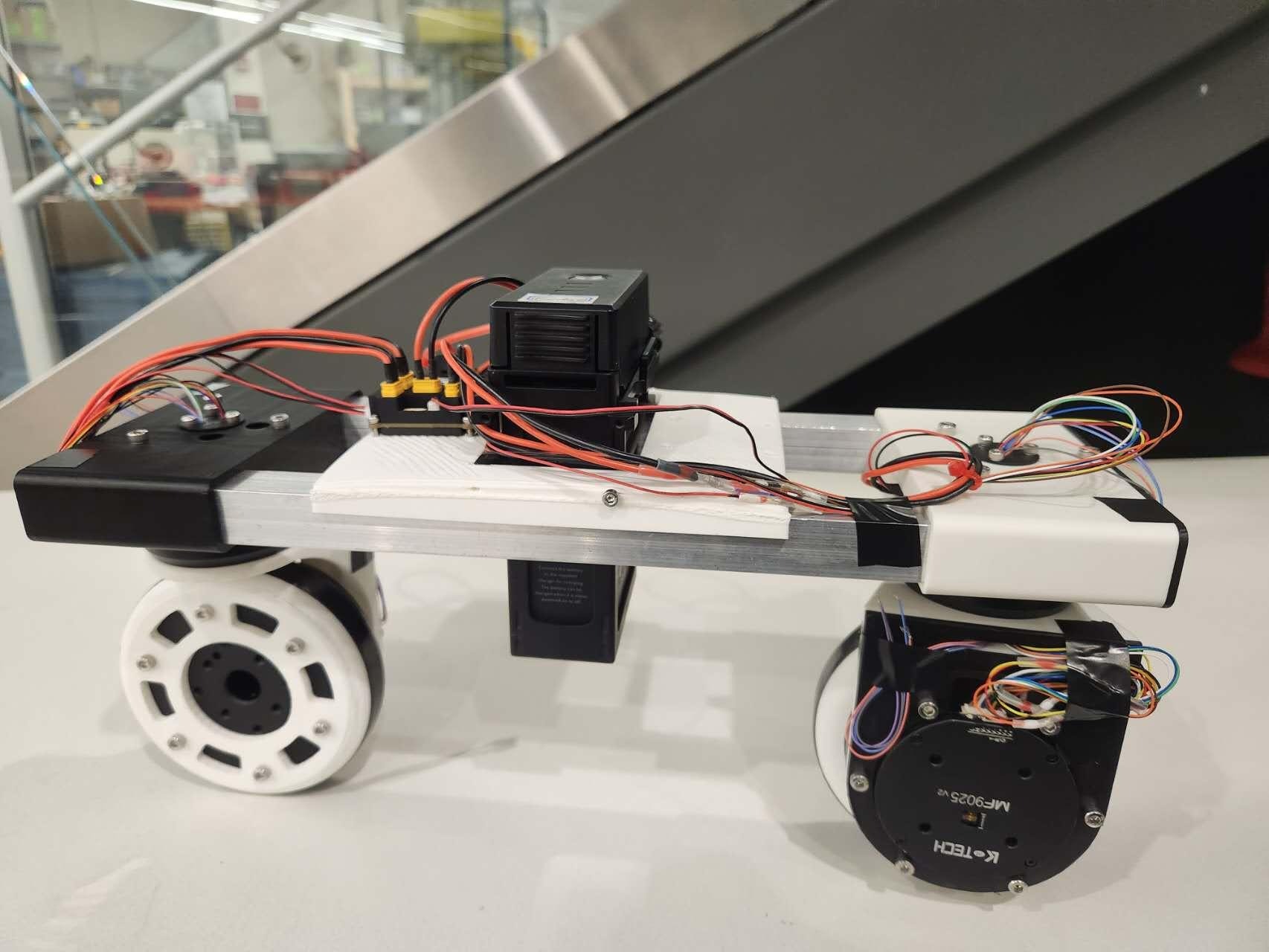
An underexplored idea for a two-wheeled balancing robot with swerve modules, exploring whether omnidirectional movement can be achieved by changing wheel configuration.
Explore projectRobotics / Projects / Blogs
I am Yuxi Liu, a robotics algorithm engineer at Mondo Robotics, working on bringing life to robots to serve a better future for humanity.
Perceive the world
Robots estimate the state of the environment, nearby agents, and their own body before anything useful can happen.

Argus bimanual robot, Xuanwu bipedal robot, RoboMaster builds, and early prototypes.
Short demos stay with project notes. Edited videos live on Bilibili.
Competition notes, event memories, and things worth writing down before memory fades.
Projects
A collection of prototypes I've built: photos, demo videos, and short technical summaries.
An underexplored idea for a two-wheeled balancing robot with swerve modules, exploring whether omnidirectional movement can be achieved by changing wheel configuration.
Explore project
A rough prototype that adds ducted fans to a two-wheeled balancing robot to test whether air thrust can help with acceleration and assist balance.
Explore projectWriting
Things worth writing down before memory fades.

