Ducted Fan Two-Wheeled Self-Balancing Robot Prototype
A two-wheeled self-balancing robot prototype with ducted fans, built to explore acceleration, balance, and terrain-adaptability problems.
Projects
RoboMaster builds, self-balancing robots, mecanum drives, and control experiments from sketches, code, tests, and competition floors.
A two-wheeled self-balancing robot prototype with ducted fans, built to explore acceleration, balance, and terrain-adaptability problems.
A two-wheeled self-balancing robot with a 2DOF gimbal, a flywheel projectile launching system, and LQR balance control.
A research project on detecting and controlling wheel slip when a balancing robot rides over minor obstacles.
An ongoing two-wheeled self-balancing robot concept with two swerve modules for omnidirectional movement.
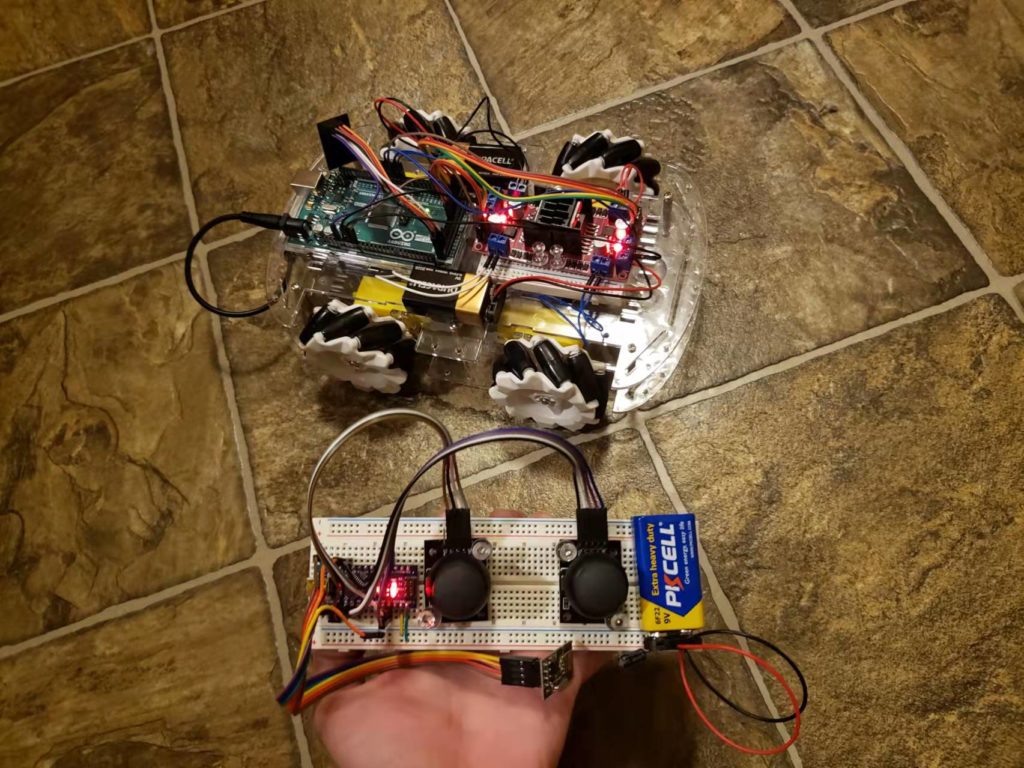
The first version of an Arduino-based remote-controlled mecanum wheel car, able to move in every direction and rotate.

A four-wheel mecanum drive robot with a 2DOF gimbal and a flywheel projectile launching system.
A two-wheel robot prototype built to achieve self balance using triple-cascade feedback PID control.