Mecanum Wheel Car Prototype
The first version of an Arduino-based remote-controlled mecanum wheel car, able to move in every direction and rotate.
2022/06/11 - Version 1.0
Arduino Based Mecanum Wheel Car
This is the very first version of an Arduino-based remote-controlled mecanum wheel car. It is able to move in all directions and rotate.
Future Improvements:
- Implement PID Control using encoders
- Integrate into STM32
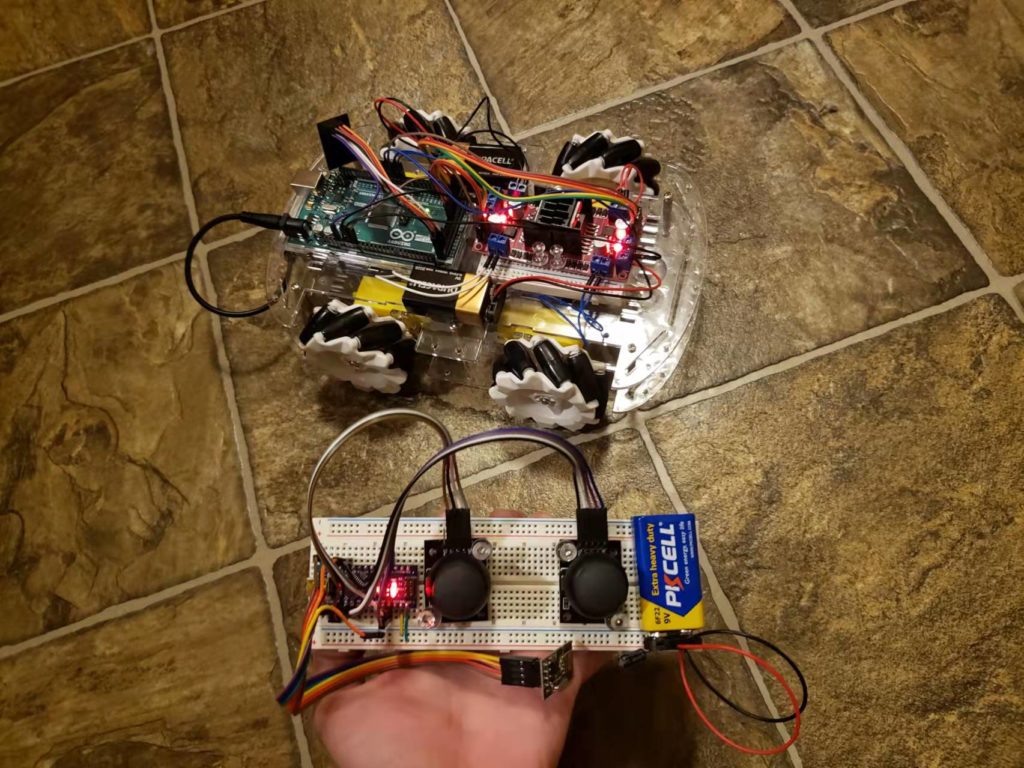
Mecanum Wheel Car Pictures
- Mecanum Wheel Car with Remote Control
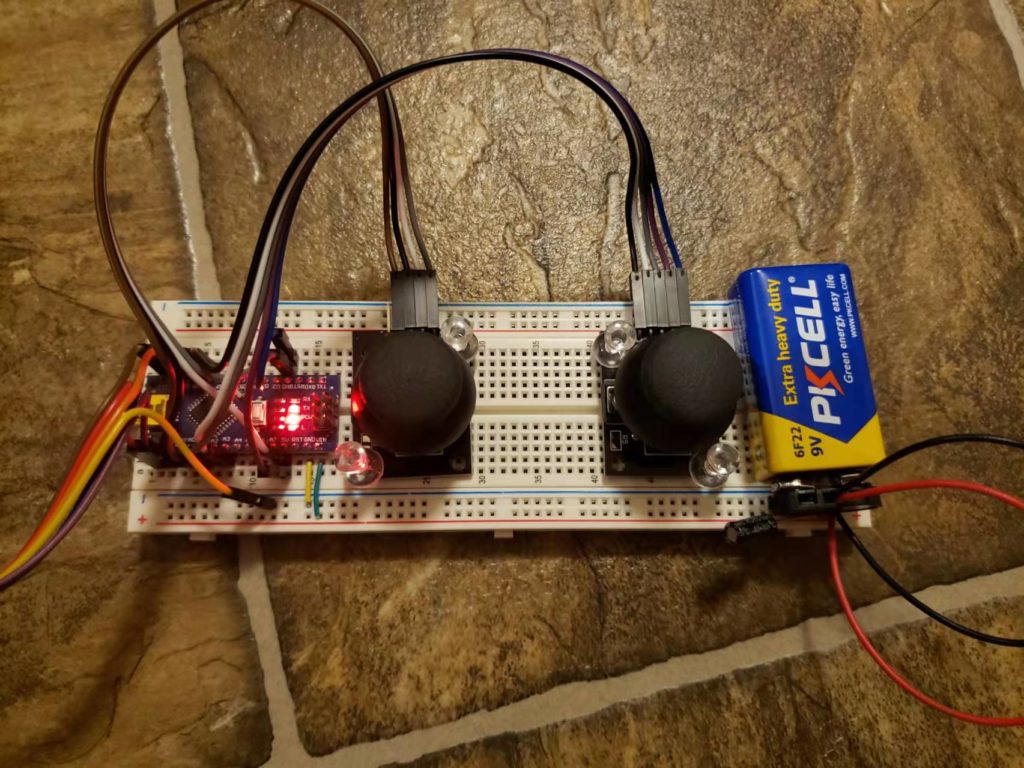
- Remote Control Close Up View
Material List
- Arduino Mega x 1
- Arduino Uno x 1
- Mecanum Car Chassis (With Motor) x 1
- L298N Motor Driver Controller x 2
- NRF24L01 Wireless Radio Frequency Transceiver Module x 2
- Joystick Module x 2
- 9V Battery x 3
- Jumper Wires and Battery Connectors
Pinout Diagrams
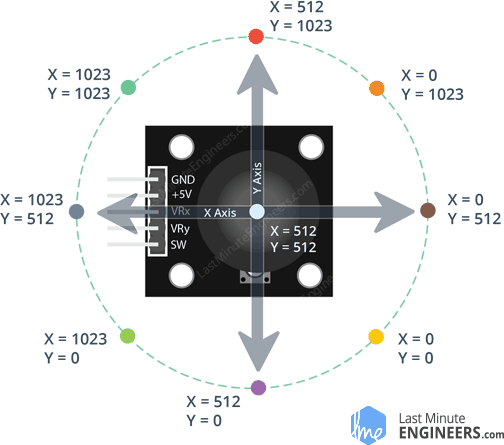
- 2-Axis Joystick
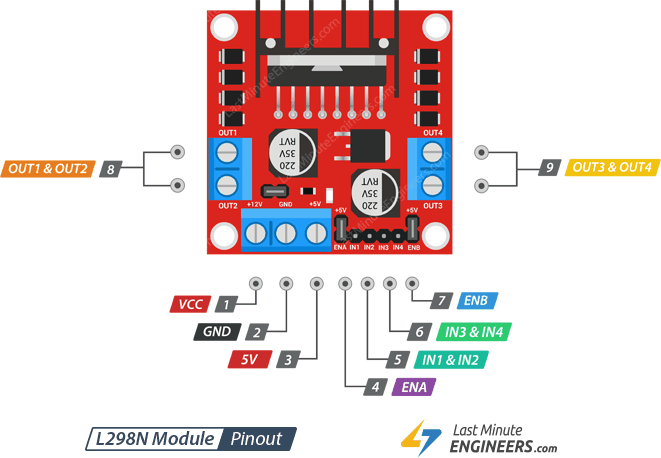
- L298N
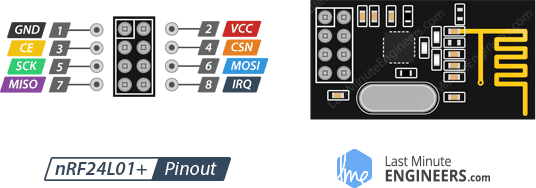
- NRF2401
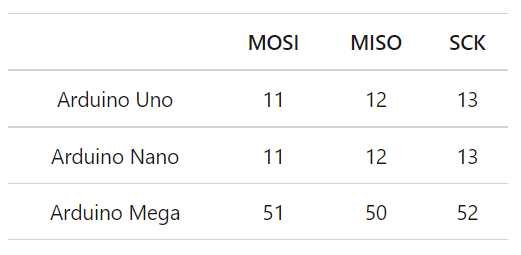
- SPI Pins
Useful Links
- NRF24L01 In-Depth Introduction
- L298N In-Depth Introduction
- 2-Axis Joystick In-Depth Introduction