涵道风扇两轮自平衡机器人原型
一台加入两个涵道风扇的两轮自平衡机器人原型,用来探索加减速、接触不足和地形适应问题。
项目
RoboMaster、两轮自平衡、麦克纳姆轮和控制实验,包含设计、代码、调试和比赛现场留下来的记录。
一台加入两个涵道风扇的两轮自平衡机器人原型,用来探索加减速、接触不足和地形适应问题。
一台两轮自平衡 RoboMaster 标准机器人,带二自由度云台、摩擦轮发射系统和 LQR 平衡控制。
一个关于自平衡机器人压过小障碍时,如何检测并控制轮子打滑的研究项目。
一个进行中的两轮自平衡机器人概念,使用两个舵轮模块探索理论上的全向运动。
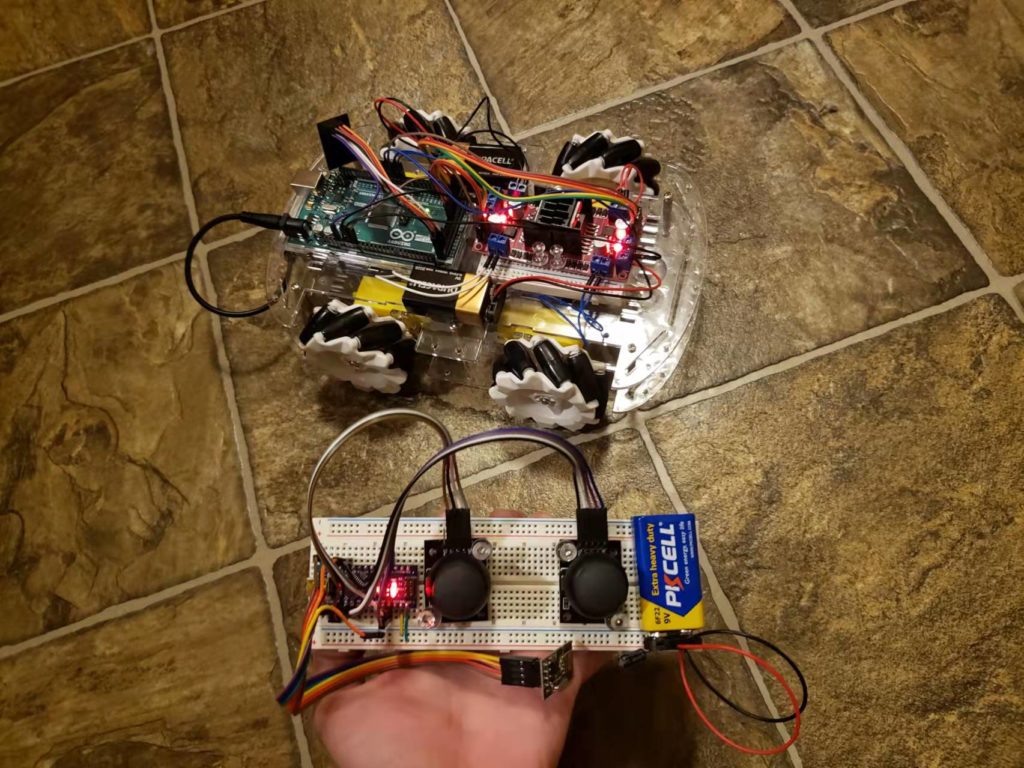
第一版基于 Arduino 的遥控麦克纳姆轮小车,可以全向移动并原地旋转。

一台四轮麦克纳姆底盘的 RoboMaster 标准机器人,带二自由度云台和摩擦轮发射系统。
一台使用三环串级 PID 控制实现自平衡的两轮机器人原型。